
Why I Build Robots
An introduction to how I think about robotics, intelligent machines, and the work behind the projects on this website.
Why I Build Robots
For as long as I’ve been engineering, I’ve been drawn to machines that behave less like tools and more like systems with intention, systems that perceive, adapt, and evolve over time.

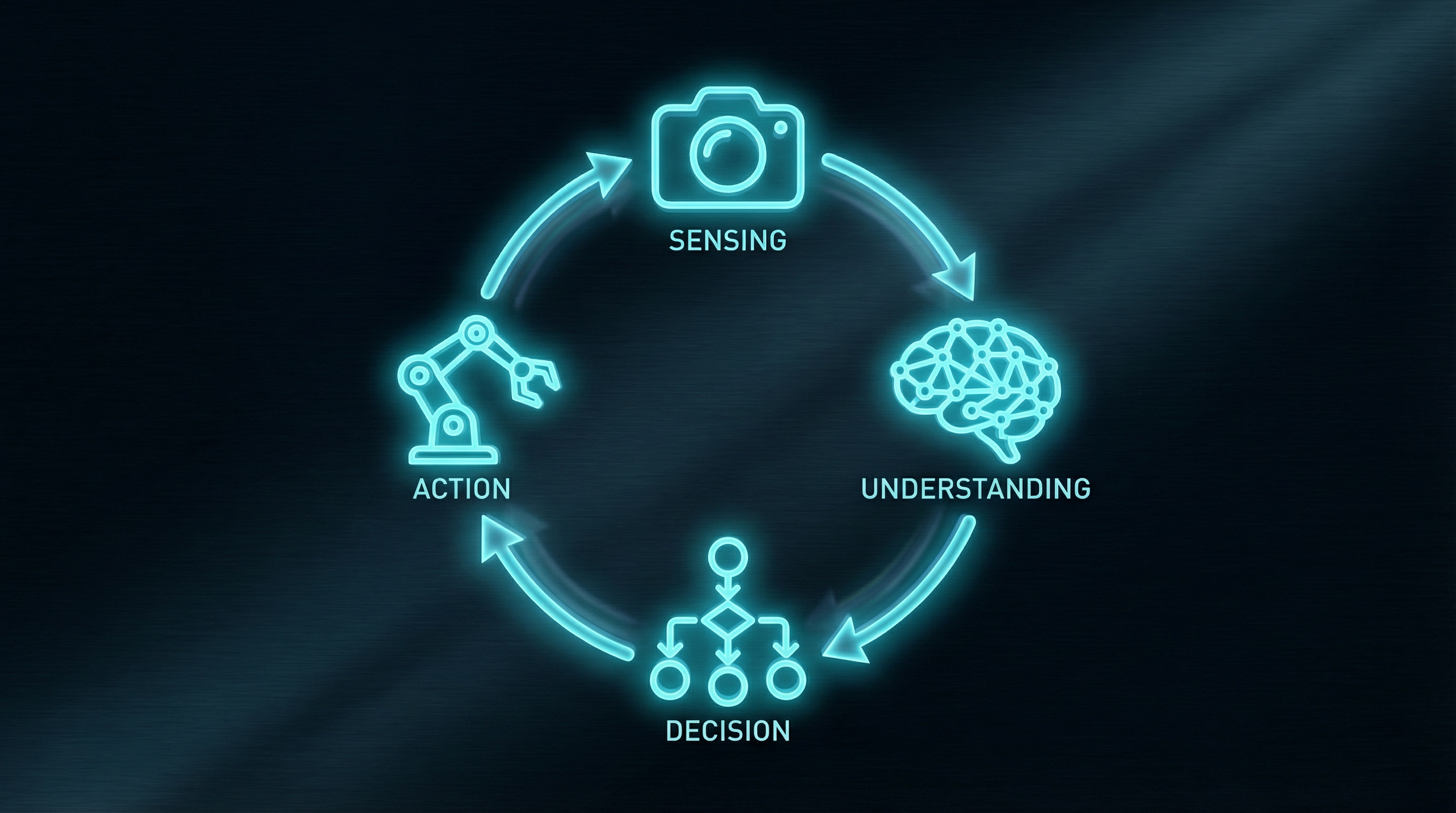
What fascinates me about robotics isn’t just movement or control, but the full loop:
Sensing → Understanding → Decision → Action
Everything I build, from UR3e manipulation pipelines to humanoid curiosity-driven RL, revolves around this loop.
The Shift From Simple Machines to Intelligent Behavior
I started with simple machines: line followers, combat robots, and manually controlled systems.
Those projects taught me mechanics, constraints, failure, speed, precision, and control.

But I always felt something missing.
A robot is only interesting when it responds.
- When perception drives movement
- When behavior adapts to context
- When the robot learns something new without being explicitly told
That’s where robotics becomes more than engineering.
That’s where it becomes intelligence embodied.
What I Try to Build Now
Today, my work spans autonomous systems, manipulation, computer vision, embedded intelligence, and reinforcement learning.
All of these projects push toward a single idea:
Robots should not only perform tasks.
They should understand, negotiate, and evolve through experience.
This is why I build both:
- Industrial systems – where precision, reliability, and perception matter
- Humanoid and learning systems – where curiosity, adaptation, and behavior shape the robot
These approaches complement each other: one grounded in physics and control, the other guided by learning and feedback.
Why This Website Exists
This website is my place to document everything:
- Technical breakdowns of robotics pipelines
- Architecture designs behind my humanoid framework
- Experiments and failures that taught me more than successes
- Personal thoughts about intelligence, embodiment, and the future of robotics
Some posts will be deep and technical.
Some will be conceptual.
Some will be experiments that go nowhere, but still worth sharing.
All of them will be real.
What Comes Next
Over the next months, I’ll be publishing:
- ROS2 pipelines and lessons learned
- Detailed project internals
- Perception + control experiments
- Humanoid learning behavior logs
- System design notes
- Failures, rewrites, and rebuilds
If you’re into robotics, AI systems, perception, or the idea of building machines that feel alive in their behavior, you’ll find something worth reading here.
This is the start.
More to come.
— Ruchit